research
Research Projects




2025
-
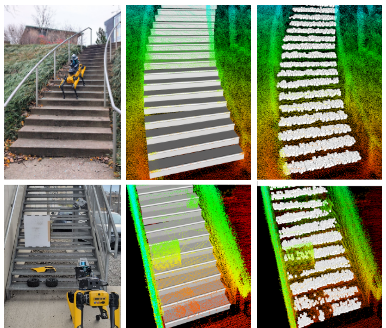 A Bayesian modeling framework for estimation and ground segmentation of cluttered staircasesJan 2025
A Bayesian modeling framework for estimation and ground segmentation of cluttered staircasesJan 2025

2024
-
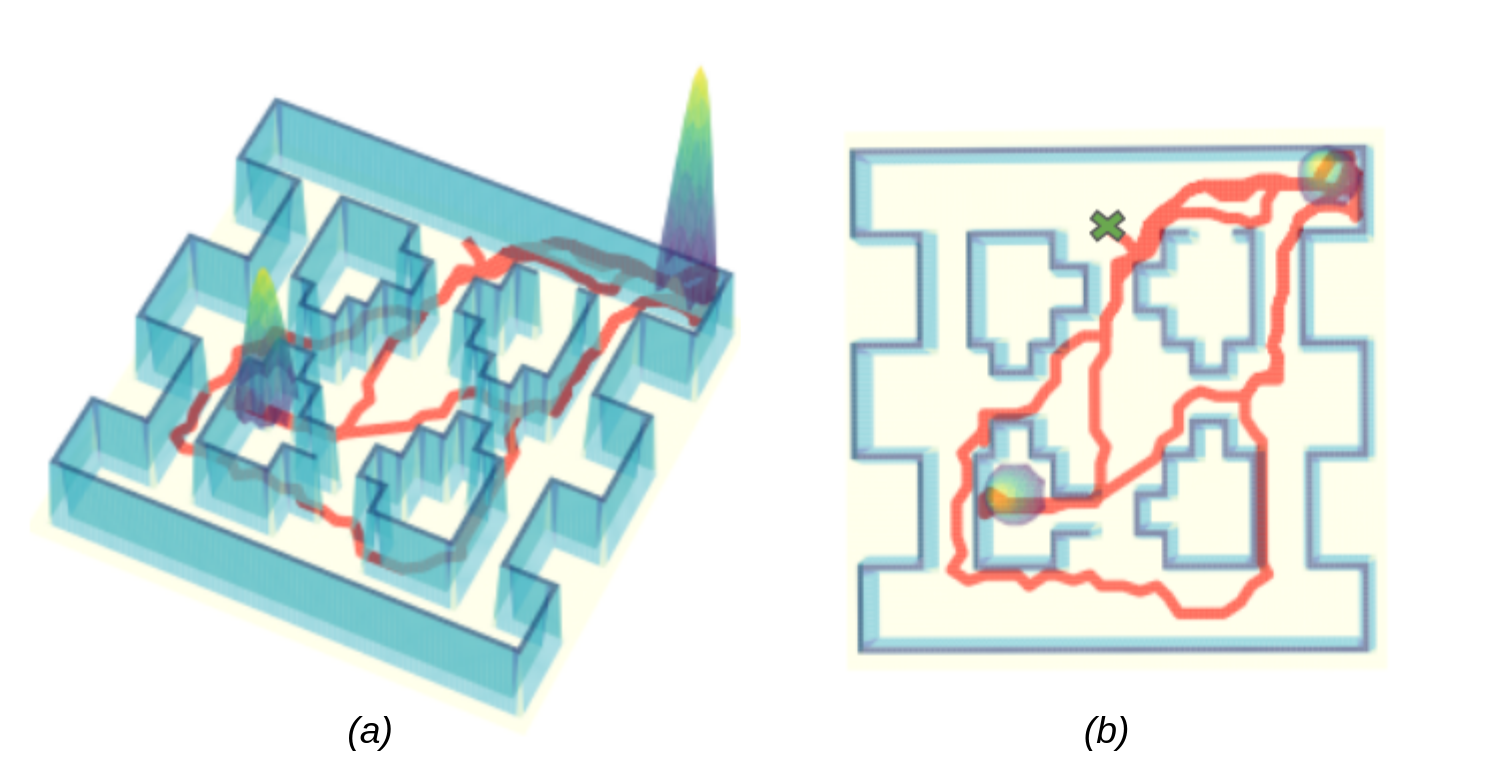 GESCE: Graph-based Ergodic Search in Cluttered EnvironmentsIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2024
GESCE: Graph-based Ergodic Search in Cluttered EnvironmentsIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Jan 2024 -
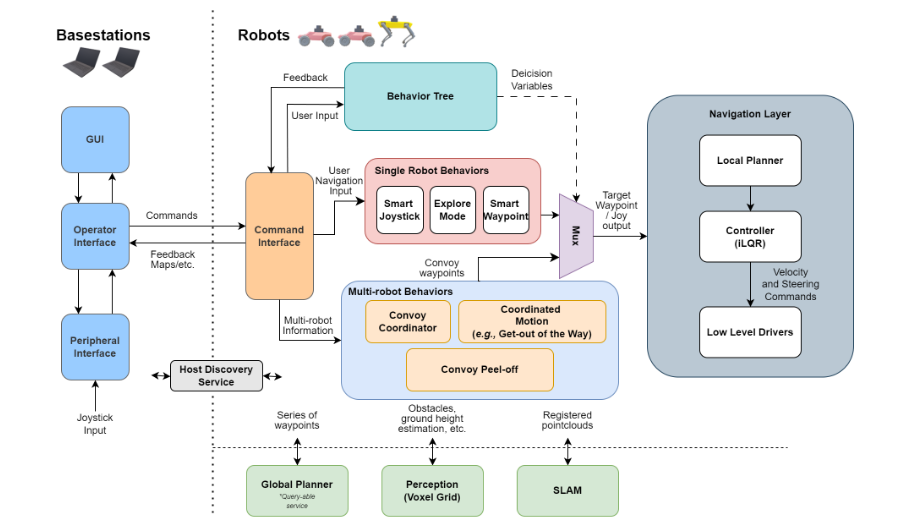 Modular, Resilient, and Scalable System Design Approaches Lessons learned in the years after DARPA Subterranean ChallengeApr 2024
Modular, Resilient, and Scalable System Design Approaches Lessons learned in the years after DARPA Subterranean ChallengeApr 2024


2022


2021
-
 Design of a Remotely Operated Vehicle (ROV) for Biofoul Cleaning and Inspection of Variety of Underwater StructuresJan 2021
Design of a Remotely Operated Vehicle (ROV) for Biofoul Cleaning and Inspection of Variety of Underwater StructuresJan 2021
